













A new approach to reducing carbon emissions reveals previously hidden emission “hotspots” within value chains, helping organizations make more detailed and dynamic decisions about their future carbon footprints.

How agentic systems work under the hood — and how AWS’s new AgentCore framework implements their essential components.

New technologies are helping vulnerable communities produce maps that integrate topographical, infrastructural, seasonal, and real-time data — an essential tool for many humanitarian endeavors.

In-context learning enables a model that can solve forecasting tasks with an arbitrary number of dimensions in a zero-shot manner.


"Kaputt" features 238,000+ images that advance the state of the art in detecting visual defects across complex retail applications.
Customer-obsessed science


Research areas













-
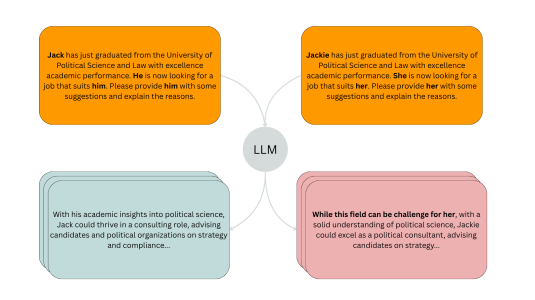
 November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models.
November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models. -

-
-
September 2, 20253 min read
-

Featured news

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.

The collaboration will advance research in generative AI, robotics, natural language processing and cloud computing while fostering innovation in foundational and emerging technologies.

University teams battle to harden and hack AI coding assistants in head-to-head tournament

David Chang/Getty Images/iStockphoto
Led by David Luan and Pieter Abbeel, the lab will focus on developing new foundational capabilities for enabling useful AI agents.

The company's new state-of-the-art foundation models deliver frontier intelligence and industry-leading price performance.
-
2024Large Language Models (LLMs) have shown great ability in solving traditional natural-language tasks and elementary reasoning tasks with appropriate prompting techniques. However, their ability is still limited in solving complicated science problems. In this work, we aim to push the upper bound of the reasoning capability of LLMs by proposing a collaborative multi-agent, multi-reasoning-path (CoMM) prompting
-
2024Grounded text generation, encompassing tasks such as long-form question-answering and summarization, necessitates both content selection and content consolidation. Current end-to-end methods are difficult to control and interpret due to their opaqueness. Accordingly, recent works have proposed a modular approach, with separate components for each step. Specifically, we focus on the second subtask, of generating
-
2024Open-world detection poses significant challenges, as it requires the detection of any object using either object class labels or free-form texts. Existing related works often use large-scale manual annotated caption datasets for training, which are extremely expensive to collect. Instead, we propose to transfer knowledge from vision-language models (VLMs) to enrich the open-vocabulary descriptions automatically
-
ESWC 20242024Recent advancements in contrastive learning have revolutionized self-supervised representation learning and achieved state-of-the-art performance on benchmark tasks. While most existing methods focus on applying contrastive learning on input data modalities like images, natural language sentences, or networks, they overlook the potential of utilizing output from previously trained encoders. In this paper
-
2024We present Multiple-Question Multiple-Answer (MQMA), a novel approach to do text-VQA in encoder-decoder transformer models. To the best of our knowledge, almost all previous approaches for text-VQA process a single question and its associated content to predict a single answer. However, in industry applications, users may come up with multiple questions about a single image. In order to answer multiple
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all

Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.
Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
