













A new approach to reducing carbon emissions reveals previously hidden emission “hotspots” within value chains, helping organizations make more detailed and dynamic decisions about their future carbon footprints.

How agentic systems work under the hood — and how AWS’s new AgentCore framework implements their essential components.

New technologies are helping vulnerable communities produce maps that integrate topographical, infrastructural, seasonal, and real-time data — an essential tool for many humanitarian endeavors.

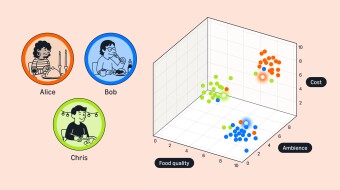
In-context learning enables a model that can solve forecasting tasks with an arbitrary number of dimensions in a zero-shot manner.


"Kaputt" features 238,000+ images that advance the state of the art in detecting visual defects across complex retail applications.
Customer-obsessed science


Research areas













-
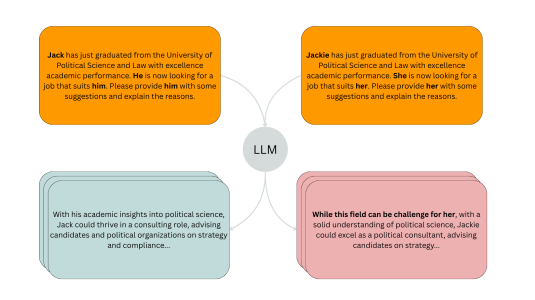
 November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models.
November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models. -

-
-
September 2, 20253 min read
-

Featured news

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.

The collaboration will advance research in generative AI, robotics, natural language processing and cloud computing while fostering innovation in foundational and emerging technologies.

University teams battle to harden and hack AI coding assistants in head-to-head tournament

David Chang/Getty Images/iStockphoto
Led by David Luan and Pieter Abbeel, the lab will focus on developing new foundational capabilities for enabling useful AI agents.

The company's new state-of-the-art foundation models deliver frontier intelligence and industry-leading price performance.
-
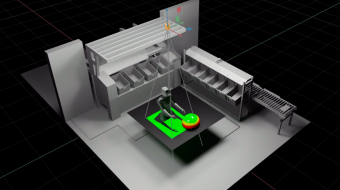
IEEE Robotics and Automation Letters2024Home robots intend to make their users lives easier. Our work moves toward more helpful home robots by enabling them to inform their users of dangerous or unsanitary anomalies in the home. Some examples of these anomalies include the user leaving their milk out, forgetting to turn off the stove, or leaving poison accessible to children. To enable home robots with these abilities, we have created a new dataset
-
2024Image to image matching has been well studied in the computer vision community. Previous studies mainly focus on training a deep metric learning model matching visual patterns between the query image and gallery images. In this study, we show that pure image-to-image matching suffers from false positives caused by matching to local visual patterns. To alleviate this issue, we propose to leverage recent
-
SIGIR 2024 Workshop on Reaching Efficiency in Neural Information Retrieval2024Information Retrieval (IR) practitioners often train separate ranking models for different domains (geo-graphic regions, languages, stores, websites,...) as it is believed that exclusively training on in-domain data yields the best performance when sufficient data is available. Despite their performance gains, training multiple models comes at a higher cost to train, maintain and update compared to having
-
KDD 2024 Workshop on Knowledge-Infused Learning (KiL)2024Methods to evaluate Large Language Model (LLM) responses and detect inconsistencies, also known as hallucinations, with respect to the provided knowledge, are becoming increasingly important for LLM applications. Current metrics fall short in their ability to provide explainable decisions, systematically check all pieces of information in the response, and are often too computationally expensive to be used
-
IEEE Robotics and Automation Letters2024We consider a local planner that utilizes model predictive control to locally deviate from a prescribed global path in response to dynamic environments, taking into account the system dynamics. To ensure the consistency between the local and global paths, we introduce the concept of locally homotopic paths for paths with different origins and destinations. We then formulate a hard constraint to ensure that
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all

Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.
Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
