













A new approach to reducing carbon emissions reveals previously hidden emission “hotspots” within value chains, helping organizations make more detailed and dynamic decisions about their future carbon footprints.

How agentic systems work under the hood — and how AWS’s new AgentCore framework implements their essential components.

New technologies are helping vulnerable communities produce maps that integrate topographical, infrastructural, seasonal, and real-time data — an essential tool for many humanitarian endeavors.

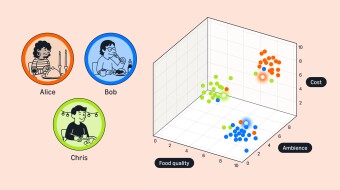
In-context learning enables a model that can solve forecasting tasks with an arbitrary number of dimensions in a zero-shot manner.


"Kaputt" features 238,000+ images that advance the state of the art in detecting visual defects across complex retail applications.
Customer-obsessed science


Research areas













-
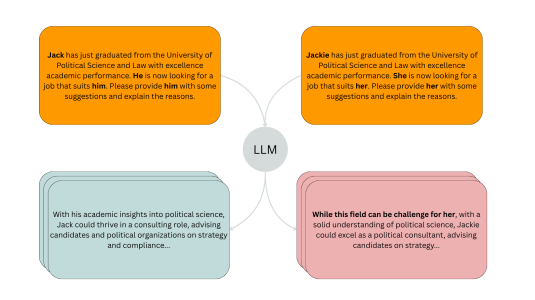
 November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models.
November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models. -

-
-
September 2, 20253 min read
-

Featured news

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.

The collaboration will advance research in generative AI, robotics, natural language processing and cloud computing while fostering innovation in foundational and emerging technologies.

University teams battle to harden and hack AI coding assistants in head-to-head tournament

David Chang/Getty Images/iStockphoto
Led by David Luan and Pieter Abbeel, the lab will focus on developing new foundational capabilities for enabling useful AI agents.

The company's new state-of-the-art foundation models deliver frontier intelligence and industry-leading price performance.
-
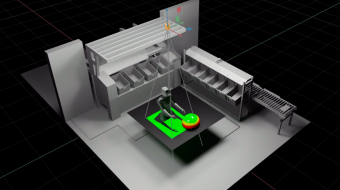
ICRA 20242024Robotic manipulation is a key enabler for automation in the fulfillment logistics sector. Such robotic systems require perception and manipulation capabilities to handle a wide variety of objects. Existing systems either operate on a closed set of objects or perform object-agnostic manipulation which lacks the capability for deliberate and reliable manipulation at scale. Object identification (ID) unlocks
-
Krylov cubic regularized Newton: A subspace second-order method with dimension-free convergence rateAISTATS 20242024Second-order optimization methods, such as cubic regularized Newton methods, are known for their rapid convergence rates; nevertheless, they become impractical in high-dimensional problems due to their substantial memory requirements and computational costs. One promising approach is to execute second-order updates within a lower-dimensional subspace, giving rise to subspace second-order methods. However
-
Predicting customer preferences for each item is a prerequisite module for most recommender systems in e-commerce. However, the sparsity of behavioral data is often a challenge to learn accurate prediction models. Given millions of items, each customer may only be able to interact with a small subset of them over time. This sparse behavioral data is insufficient to represent item-customer and item-item
-
2024We introduce a novel and efficient approach for text-based video-to-video editing that eliminates the need for resource-intensive per-video-per-model finetuning. At the core of our approach is a synthetic paired video dataset tailored for video-to-video transfer tasks. Inspired by Instruct Pix2Pix’s image transfer via editing instruction, we adapt this paradigm to the video domain. Extending the Prompt-to-Prompt
-
2024We propose a single-shot approach to determining 6-DoF pose of an object with available 3D computer-aided design (CAD) model from a single RGB image. Our method, dubbed MRC-Net, comprises two stages. The first performs pose classification and renders the 3D object in the classified pose. The second stage performs regression to predict fine-grained residual pose within class. Connecting the two stages is
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all

Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.
Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
