













A new approach to reducing carbon emissions reveals previously hidden emission “hotspots” within value chains, helping organizations make more detailed and dynamic decisions about their future carbon footprints.

How agentic systems work under the hood — and how AWS’s new AgentCore framework implements their essential components.

New technologies are helping vulnerable communities produce maps that integrate topographical, infrastructural, seasonal, and real-time data — an essential tool for many humanitarian endeavors.

In-context learning enables a model that can solve forecasting tasks with an arbitrary number of dimensions in a zero-shot manner.


"Kaputt" features 238,000+ images that advance the state of the art in detecting visual defects across complex retail applications.
Customer-obsessed science


Research areas













-
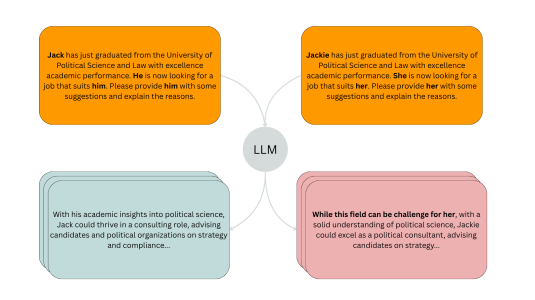
 November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models.
November 20, 20254 min readA new evaluation pipeline called FiSCo uncovers hidden biases and offers an assessment framework that evolves alongside language models. -

-
-
September 2, 20253 min read
-

Featured news

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.

The collaboration will advance research in generative AI, robotics, natural language processing and cloud computing while fostering innovation in foundational and emerging technologies.

University teams battle to harden and hack AI coding assistants in head-to-head tournament

David Chang/Getty Images/iStockphoto
Led by David Luan and Pieter Abbeel, the lab will focus on developing new foundational capabilities for enabling useful AI agents.

The company's new state-of-the-art foundation models deliver frontier intelligence and industry-leading price performance.
-
2024We propose Strongly Supervised pre-training with ScreenShots (S4) - a novel pre-training paradigm for Vision-Language Models using data from large-scale web screenshot rendering. Using web screenshots unlocks a treasure trove of visual and textual cues that are not present in using image-text pairs. In S4, we leverage the inherent tree-structured hierarchy of HTML elements and the spatial localization to
-
Journal of Business Research2024Sellers on online marketplaces such as Amazon.com use a variety of retail and retail media advertising services to improve their brand performance, including awareness, consideration, and revenue. But how can they measure their progress and drive these metrics? For 122,000 brands, we measure Amazon shoppers’ brand awareness, consideration, and purchases and test how they change with ad and retail actions
-
2024Given a node-attributed graph, and a graph task (link prediction or node classification), can we tell if a graph neural network (GNN) will perform well? More specifically, do the graph structure and the node features carry enough usable information for the task? Our goals are (1) to develop a fast tool to measure how much information is in the graph structure and in the node features, and (2) to exploit
-
MSR 20242024Data-driven program translation has been recently the focus of sev- eral lines of research. A common and robust strategy is supervised learning. However, there is typically a lack of parallel training data, i.e., pairs of code snippets in source and target language. While many data augmentation techniques exist in the domain of natural language processing, they cannot be easily adapted to tackle code translation
-
ICRA 20242024In this paper, we present a probabilistic and unconstrained model predictive control formulation for robot navigation under uncertainty. We present (1) a closed-form approximation of the probability of collision that naturally models the propagation of uncertainty over the planning horizon and is computationally cheap to evaluate, and (2) a collision-cost formulation which provably preserves forward invariance
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all

Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.
Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
