













A new approach to reducing carbon emissions reveals previously hidden emission “hotspots” within value chains, helping organizations make more detailed and dynamic decisions about their future carbon footprints.

How agentic systems work under the hood — and how AWS’s new AgentCore framework implements their essential components.

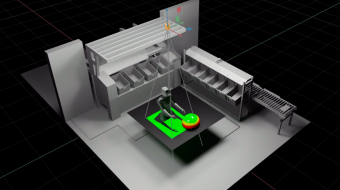
New technologies are helping vulnerable communities produce maps that integrate topographical, infrastructural, seasonal, and real-time data — an essential tool for many humanitarian endeavors.

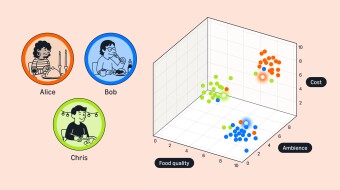
In-context learning enables a model that can solve forecasting tasks with an arbitrary number of dimensions in a zero-shot manner.


"Kaputt" features 238,000+ images that advance the state of the art in detecting visual defects across complex retail applications.
Customer-obsessed science


Research areas













-
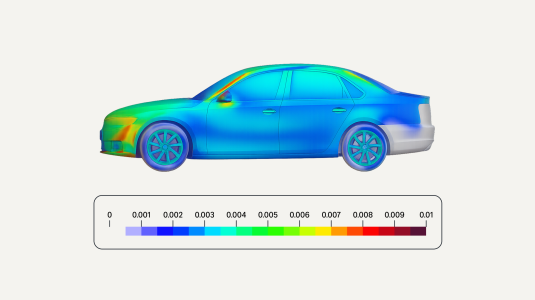
 September 26, 2025To transform scientific domains, foundation models will require physical-constraint satisfaction, uncertainty quantification, and specialized forecasting techniques that overcome data scarcity while maintaining scientific rigor.
September 26, 2025To transform scientific domains, foundation models will require physical-constraint satisfaction, uncertainty quantification, and specialized forecasting techniques that overcome data scarcity while maintaining scientific rigor. -

Featured news

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.

The collaboration will advance research in generative AI, robotics, natural language processing and cloud computing while fostering innovation in foundational and emerging technologies.

University teams battle to harden and hack AI coding assistants in head-to-head tournament

David Chang/Getty Images/iStockphoto
Led by David Luan and Pieter Abbeel, the lab will focus on developing new foundational capabilities for enabling useful AI agents.

The company's new state-of-the-art foundation models deliver frontier intelligence and industry-leading price performance.
-
2024Graph machine learning (GML) is effective in many business applications. However, making GML easy to use and applicable to industry applications with massive datasets remain challenging. We developed GraphStorm, which provides an end-to-end solution for scalable graph construction, graph model training and inference. GraphStorm has the following desirable properties: (a) Easy to use: it can perform graph
-
ACL Findings 20242024Leveraging external knowledge is crucial for achieving high performance in knowledge-intensive tasks, such as question answering. The retrieve-and-read approach is widely adopted for integrating external knowledge into a language model. However, this approach suffers from increased computational cost and latency due to the long context length, which grows proportionally with the number of retrieved knowledge
-
2024We focus on the task of learning the value function in the reinforcement learning (RL) setting. This task is often solved by updating a pair of online and target networks while ensuring that the parameters of these two networks are equivalent. We propose Lookahead-Replicate (LR), a new value-function approximation algorithm that is agnostic to this parameter-space equivalence. Instead, the LR algorithm
-
Query Auto-Completion (QAC) is a fundamental component of user search experience on e-commerce websites. It assists in finding userintended products, by automatically presenting search queries as users typing in the search bar. Traditional QAC systems build upon query popularity to suggest a list of potential completions, but they fall short for unforeseen search prefixes. A generative Large Language Model
-
IEEE RO-MAN 20242024For social robots operating in home environments, identifying appropriate parking locations which are “out of the way” is a challenging and multi-faceted problem. This paper proposes a solution to one core aspect of that problem, specifically a model for estimating locations where the robot may block walking paths through narrow spaces. For generality, this model assumes no a priori knowledge about user
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all

Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.
Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
