













Millimeter-scale particles of nuclear-reactor fuel are encased in four layers of different materials that act as a “miniature containment system”.


Customer-obsessed science


Research areas













-
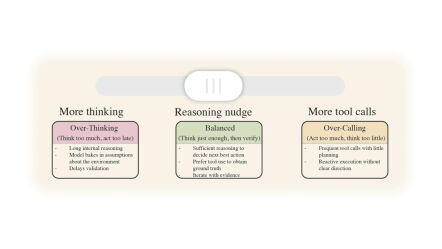
 June 8, 20267 min readFour approaches can dramatically improve the performance and trustworthiness of AI agents in operational environments.
June 8, 20267 min readFour approaches can dramatically improve the performance and trustworthiness of AI agents in operational environments. -

-
-
-
May 27, 20264 min readMachine learning



Featured news

Hosted by Danielle Perszyk, cognitive scientist at Amazon's AGI Lab, the podcast features researchers tackling the hardest problems in agentic AI — from building reliable perception systems to designing training environments that mirror human learning.
The Antibody Developability Benchmark is powered by one of the most diverse antibody datasets in public literature, enabling transparent performance evaluation for AI-guided antibody design.
Challenge pushes teams to demonstrate measurable gains in secure-coding performance while building AI agents that advance real-world utility and reliability at scale.

Initiative will fund over 100 doctoral students researching machine learning, computer vision, and natural-language processing at nine universities.
-
2025Data perspectivism goes beyond majority vote label aggregation by recognizing various perspectives as legitimate ground truths. However, current evaluation practices remain fragmented, making it difficult to compare perspectivist approaches and analyze their impact on differ-ent users and demographic subgroups. To ad-dress this gap, we introduce PersEval, the first unified framework for evaluating perspectivist
-
2025Existing outfit recommendation frameworks focus on outfit compatibility prediction and complementary item retrieval. We present a text-driven outfit generation framework, Text2Outfit, which generates outfits controlled by text prompts. Our framework supports two forms of outfit recommendation: 1) Text-to-outfit generation, where the prompt includes the specification for each outfit item (e.g., product features
-
2025E-commerce stores increasingly use Large Language Models (LLMs) to enhance catalog data quality through automated regeneration. A critical challenge is accurately predicting missing structured attribute values across multilingual product catalogs, where LLM performance varies significantly by language. While existing approaches leverage general knowledge through prompt engineering and external retrieval
-
VLDB 20252025Cloud service providers usually leverage standard benchmarks such as TPC-H and TPC-DS to evaluate and optimize the performance of cloud data analytic systems. However, these benchmarks have fixed query patterns and are unable to effectively generate statistics of the cloud workloads in production. For example, they cannot simulate the real workload with the similar performance metrics such as CPU Time and
-
ACM CCS 20252025Motivated by applications to efficient secure computation, we consider the following problem of encrypted matrix-vector product (EMVP). Let F be a finite field. In an offline phase, a client uploads an encryption of a matrix M ∈ F^(m×ℓ) to a server, keeping only a short secret key. The server stores the encrypted matrix M̂. In the online phase, the client may repeatedly send encryptions q̂_i of query vectors
Collaborations
View allWhether you're a faculty member or student, there are number of ways you can engage with Amazon.
View all
Gretchen Ertl
The program offers unrestricted funds and other resources to support research at academic institutions and non-profit organizations in areas that align with our mission.

A global university competition to drive secure innovation in generative AI technology, which focuses on responsible AI and large language model coding security.

Credit: Wolfram Scheible
We partner with particular academic organizations across the world for deep and sustained collaborations in multiple research areas of mutual interest.

Courtesy of Pai-Ling Yin
We hire world-class academics to work on large-scale technical challenges, while they continue to teach and conduct research at their universities.
